



箱庭ラボと湘南工科大学が挑む、ドローン故障シミュレーションの新たな試み
画期的なドローンシミュレーション技術の登場
近年、ドローンの急速な進化とそれに伴う社会実装が進んでいますが、その一方で、ドローンの安全性に関する課題も増加しています。この度、合同会社箱庭ラボが湘南工科大学と協力し、ドローンのモータ故障問題に対する新たな仮想実験環境の技術検証を始めることとなりました。
研究背景と目的
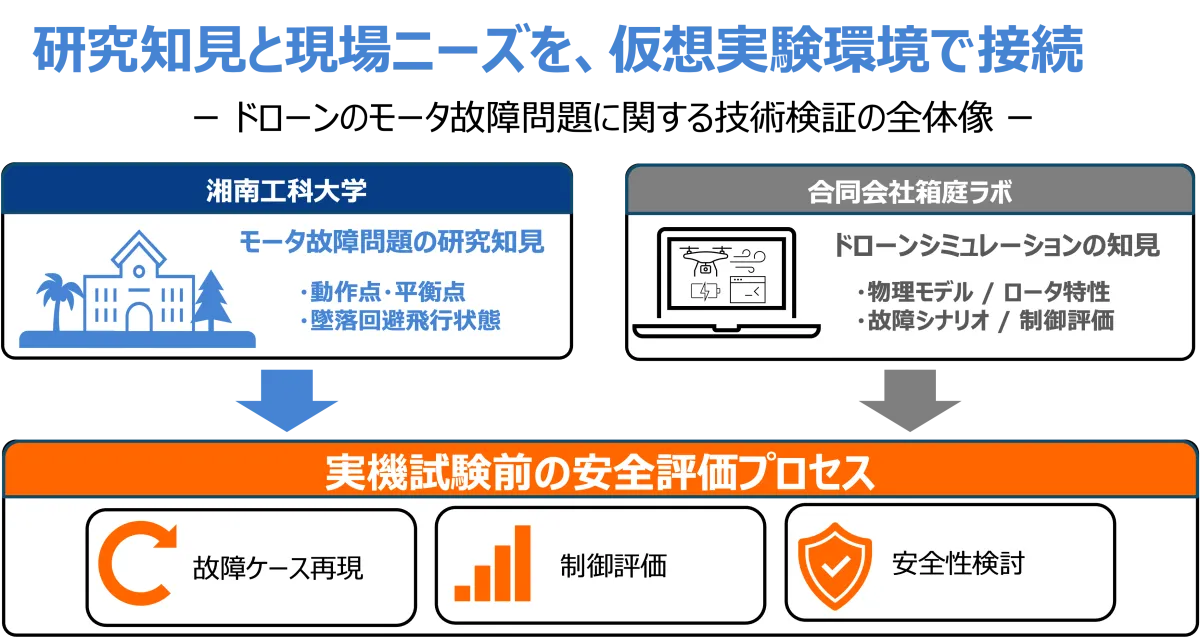
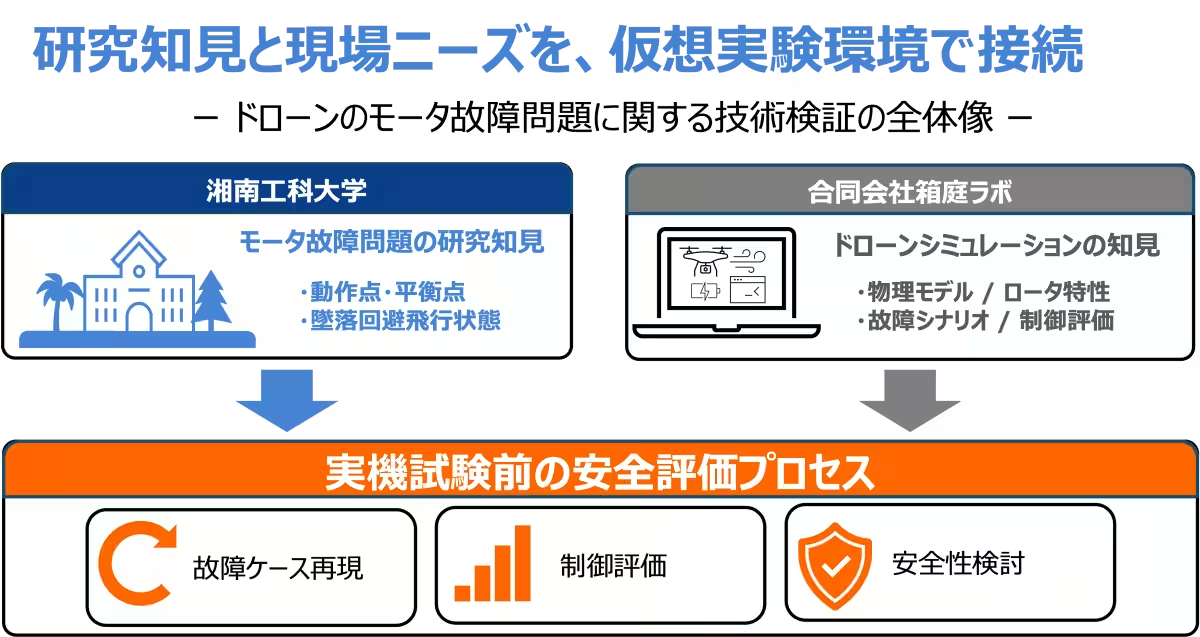
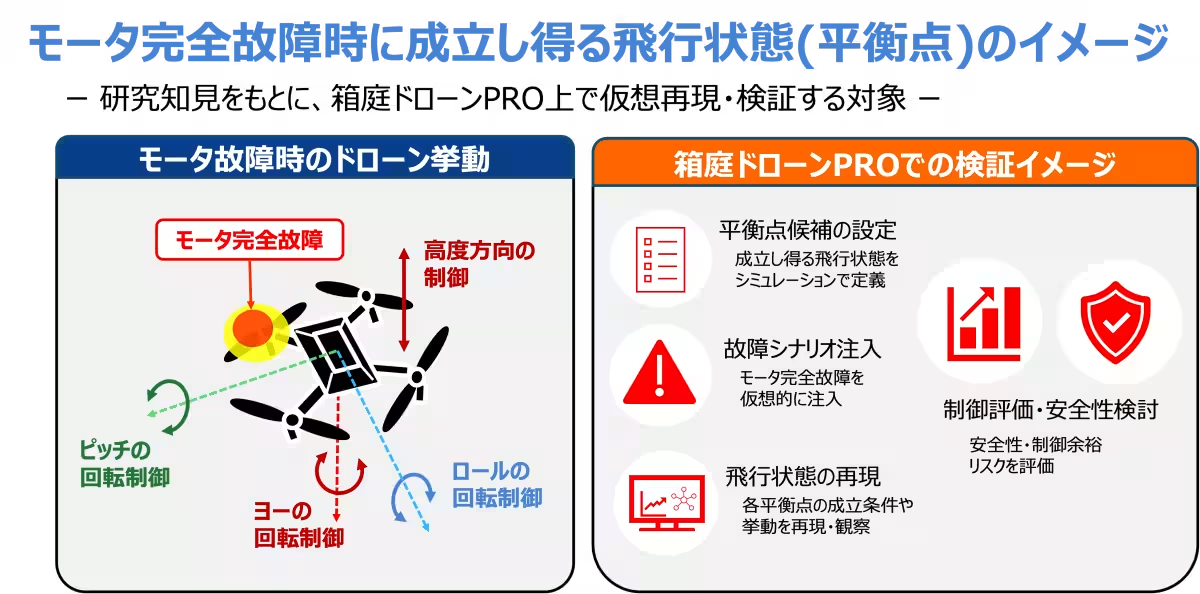
湘南工科大学の岡崎秀晃教授と磯貝海斗氏による研究は、特にマルチロータ機に焦点を当てており、モータの完全故障時にどのように飛行状況を維持できるかを探求しています。モータ故障や制御異常は飛行中の重大なリスクであり、その安全性評価は今後のドローン社会において不可欠な要素です。
本プロジェクトの核となるのは、実環境では再現が難しい異常事態を仮想空間上で安全にシミュレーションできるという点です。特に、ドローンが直面する可能性のある故障シナリオを事前に評価し、リスクを特定する手段の構築が求められていたのです。
箱庭ラボのアプローチ
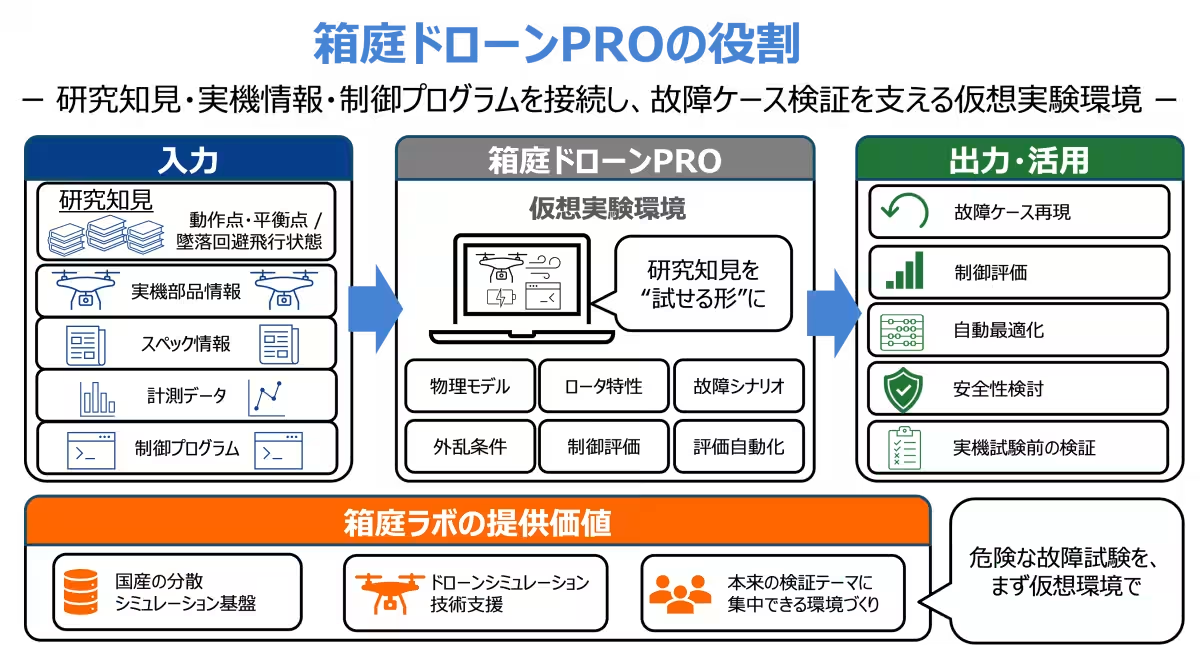
箱庭ラボが提供する分散シミュレーション基盤「箱庭」と、その上で動作する「箱庭ドローンPRO」は、単なる飛行の可視化にとどまらず、故障シナリオの解析や制御技術の向上を目指した複合的なシミュレーション環境を提供します。このシステムは、研究知見をもとにした物理モデルや動作特性を結びつけることにより、ドローンの動作点や平衡点を視覚化し、モータ故障時の挙動を詳細に再現することが可能です。
箱庭ラボは、OSS(オープンソースソフトウェア)を活用した研究向けの開発支援を通して、実機による試験前に専門的な知見を提供します。これにより研究者や企業は、効果的な検証作業に専念できる環境が整えられます。
今後の展望
現在の取り組みは始まったばかりですが、2026年7月以降には実機仕様のドローンモデルやPIDチューニングなどの詳細な検証作業を進める予定です。その過程で、ドローンの安全性評価に必要な知見を収集し、より高度な制御ロジックの評価方法を確立していくことを目指します。
関係者のコメント
湘南工科大学の岡崎教授は、「マルチロータ型ドローンにおけるモータ故障に関する研究は、安全性の向上にとって極めて重要である。実機での再現が難しい状況を、仮想環境上で実証できる取り組みは非常に意義深い」と語っています。
箱庭ラボは、"現実の前に、失敗できる世界をつくる"という理念のもと、ドローン技術の向上を目指した活動を続けています。物理シミュレーションと統合された制御技術の発展を通し、未来のドローン社会に一歩前進することが期待されます。
お問い合わせ
合同会社箱庭ラボへのお問い合わせは以下にてどうぞ。担当者の森崇まで、メール([email protected])でご連絡ください。
トピックス(その他)





【記事の利用について】
タイトルと記事文章は、記事のあるページにリンクを張っていただければ、無料で利用できます。
※画像は、利用できませんのでご注意ください。
【リンクついて】
リンクフリーです。